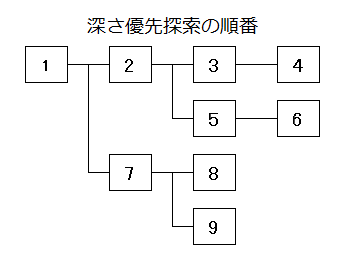
深さ優先探索(Depth First Search)とは
深さ優先探索とは、木構造やグラフの探索を行うためのアルゴリズムです。始点となるノードから目的のノードが見つかるか子のないノードにたどり着くまで探索を繰り返し、そのあとは探索の終わってないノードまで戻って再度探索を繰り返します。
探索するのノードは スタック(FILO) を使って管理することになります。あるいは再帰的に呼び出す方法を用います。
アルゴリズム
- 始点のノードを探索待ちスタックに追加する。
- 探索待ちスタックにノードがあれば取り出す。なければ全ノード探索完了。
- 取り出したノードが目的ノードであれば探索完了。
- 取り出したノードに隣接するノードの内、未探索のノードを探索待ちスタックに追加する。
- 2. の処理にもどる。
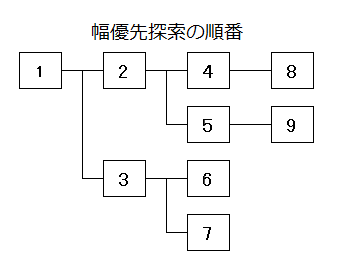
先入れ後出しのスタックに探索待ちのノードを格納することで、始点から末端のノードまでの探索が一直線に行われることになります。あとは探しているノードが見つかるか、スタックが空になるまで繰り返すだけです。幅優先探索と比べての違いは、キューを使うかスタックを使うかの違いと言っても過言ではありません。
迷路を解く
深さ優先探索の例として迷路を解いてみます。迷路もグラフの一つとみなせるので、深さ優先探索で答えを見つけることができます。答えが求まれば、スタート地点からゴール地点までの経路を求めることができます。
迷路生成アルゴリズム(穴掘り法)で生成した迷路を解くこととします。迷路は一意のルートでゴールに辿り着きます。つまりゴールまでの経路は最短経路でもあります。
スタート初めてからゴールを見つけるだけなら上記のアルゴリズムを実装すればよいですが、経路保持するには少し工夫が必要です。
経路の保存方法
ノードを探索するときに、どのノードから到達したかという情報(直前のノード)を保持します。ノードは1回しか探索されないので、そのノードへの到達経路は1つのみです。したがって、ゴールのノードから直前のノードを逆にたどっていけばスタートのノードへの経路が求まります。詳しくはサンプルコードを参照してください。
迷路を解くシミュレーション
サンプルコード
C#
using System;
using System.Collections.Generic;
using System.Linq;
public static class Program
{
public static void Main()
{
var maze = CreateMaze();
var bfs = new MazeDfs(maze);
bfs.Search();
bfs.DebugPrint(maze);
}
// 15*15 の動作確認用迷路の配列を作成します。
public static int[,] CreateMaze()
{
return new int[15, 15] {
{1,1,1,1,1,1,1,1,1,1,1,1,1,1,1},
{1,0,0,0,1,0,0,0,0,0,0,0,0,0,1},
{1,1,1,0,1,1,1,0,1,1,1,0,1,0,1},
{1,0,1,0,0,0,1,0,0,0,1,0,1,0,1},
{1,0,1,1,1,0,1,1,1,0,1,0,1,1,1},
{1,0,1,0,0,0,0,0,0,0,1,0,0,0,1},
{1,0,1,0,1,1,1,1,1,1,1,1,1,0,1},
{1,0,0,0,0,0,0,0,1,0,1,0,0,0,1},
{1,1,1,1,1,0,1,0,1,0,1,0,1,1,1},
{1,0,0,0,1,0,1,0,0,0,1,0,0,0,1},
{1,0,1,0,1,0,1,1,1,0,1,1,1,1,1},
{1,0,1,0,1,0,0,0,1,0,1,0,0,0,1},
{1,0,1,0,1,1,1,0,1,0,1,0,1,0,1},
{1,0,1,0,0,0,0,0,1,0,0,0,1,0,1},
{1,1,1,1,1,1,1,1,1,1,1,1,1,1,1}
};
}
}
// 深さ優先探索
public class MazeDfs
{
private int[,] Maze; // 迷路
private int[] VisitedArray; // 訪問済配列
private Cell Start; // 迷路スタート
private Cell Goal; // 迷路ゴール
// 迷路の横幅
private int MazeWidth
{
get { return this.Maze.GetLength(0); }
}
// 迷路の高さ
private int MazeHeight
{
get { return this.Maze.GetLength(1); }
}
// コンストラクタ
public MazeDfs(int[,] maze)
{
this.Maze = maze;
this.VisitedArray = new int[MazeWidth * MazeHeight];
this.Start = new Cell(1, 1);
this.Goal = new Cell(MazeWidth - 2, MazeHeight - 2);
}
// 探索処理
public void Search()
{
var isGoaled = false;
var queue = new Stack<Cell>();
queue.Push(Start);
// 訪問済配列を -1 で初期化
VisitedArray = Enumerable.Repeat(-1, VisitedArray.Length).ToArray();
VisitedArray[ToIndex(Start)] = ToIndex(Start);
// 探索待ちのセルがなくなるまで続ける
while (queue.Count > 0 && !isGoaled)
{
// 探索対象のセルを取り出す
var target = queue.Pop();
// 対象のセルから上下左右のセルを探索する
foreach (Direction dir in Enum.GetValues(typeof(Direction)))
{
// 次の探索セルを作成する
var nextCell = new Cell(target.X, target.Y);
switch (dir)
{
case Direction.Up:
nextCell.Y -= 1;
break;
case Direction.Right:
nextCell.X += 1;
break;
case Direction.Down:
nextCell.Y += 1;
break;
case Direction.Left:
nextCell.X -= 1;
break;
}
// 探索候補セルが範囲内
if (nextCell.X >= 0 && nextCell.Y >= 0 && nextCell.X < MazeWidth && nextCell.Y < MazeHeight)
{
// 未探索の場合かつ通路の場合のみキューに詰めると同時に探索済情報設定
if (VisitedArray[ToIndex(nextCell)] < 0
&& Maze[nextCell.X, nextCell.Y] == Path)
{
// 探索済情報
SetVisited(target, nextCell);
if (nextCell.X == Goal.X && nextCell.Y == Goal.Y)
{
// 探索候補がゴールの場合すぐに抜けるために探索候補を削除して抜ける
// console.log('ゴールが見つかりました。おめでとう ...');
queue.Clear();
queue.Push(nextCell);
isGoaled = true;
break;
}
else
{
// キューに詰める
queue.Push(nextCell);
}
}
}
}
}
// 探索結果を配列に設定
if (isGoaled)
{
SetRoute();
}
}
// ゴールへのルートを2次元配列に設定
public void SetRoute()
{
// 訪問済の配列からゴールまでのルートを設定する
var startIndex = ToIndex(Start);
var goalIndex = ToIndex(Goal);
var beforeIndex = VisitedArray[goalIndex];
var route = new List<int>();
while (beforeIndex >= 0 && beforeIndex != startIndex)
{
// ゴールからスタートへのルートをたどる
route.Add(beforeIndex);
beforeIndex = VisitedArray[beforeIndex];
}
// ゴールへのルートを設定
foreach (var index in route)
{
var cell = ToCell(index);
Maze[cell.X, cell.Y] = Route;
}
}
// 訪問済データの設定を行う
private void SetVisited(Cell fromCell, Cell toCell)
{
var fromIndex = ToIndex(fromCell);
var toIndex = ToIndex(toCell);
VisitedArray[toIndex] = fromIndex;
}
// Cellを1次元配列のインデックスに変換
private int ToIndex(Cell cell)
{
return cell.X + MazeWidth * cell.Y;
}
// 1次元配列のインデックスをセルに変換
private Cell ToCell(int index)
{
return new Cell(index % MazeWidth, index / MazeWidth);
}
// 通路・壁情報
const int Path = 0;
const int Wall = 1;
const int Route = 99;
// セル情報
private struct Cell
{
public int X { get; set; }
public int Y { get; set; }
public Cell(int x, int y)
{
this.X = x;
this.Y = y;
}
}
// 方向
private enum Direction
{
Up = 0,
Right = 1,
Down = 2,
Left = 3
}
// デバッグ用処理
public void DebugPrint(int[,] maze)
{
var text = string.Empty;
Console.WriteLine($"Width: {maze.GetLength(0)}");
Console.WriteLine($"Height: {maze.GetLength(1)}");
for (int y = 0; y < maze.GetLength(1); y++)
{
for (int x = 0; x < maze.GetLength(0); x++)
{
if (x == Start.X && y == Start.Y)
{
text += "S ";
}
else if (x == Goal.X && y == Goal.Y)
{
text += " G";
}
else if (maze[x, y] == Path)
{
text += " ";
}
else if (maze[x, y] == Wall)
{
text += "##";
}
else if (maze[x, y] == Route)
{
text += "..";
}
}
text += "\r\n";
}
Console.WriteLine(text);
}
}